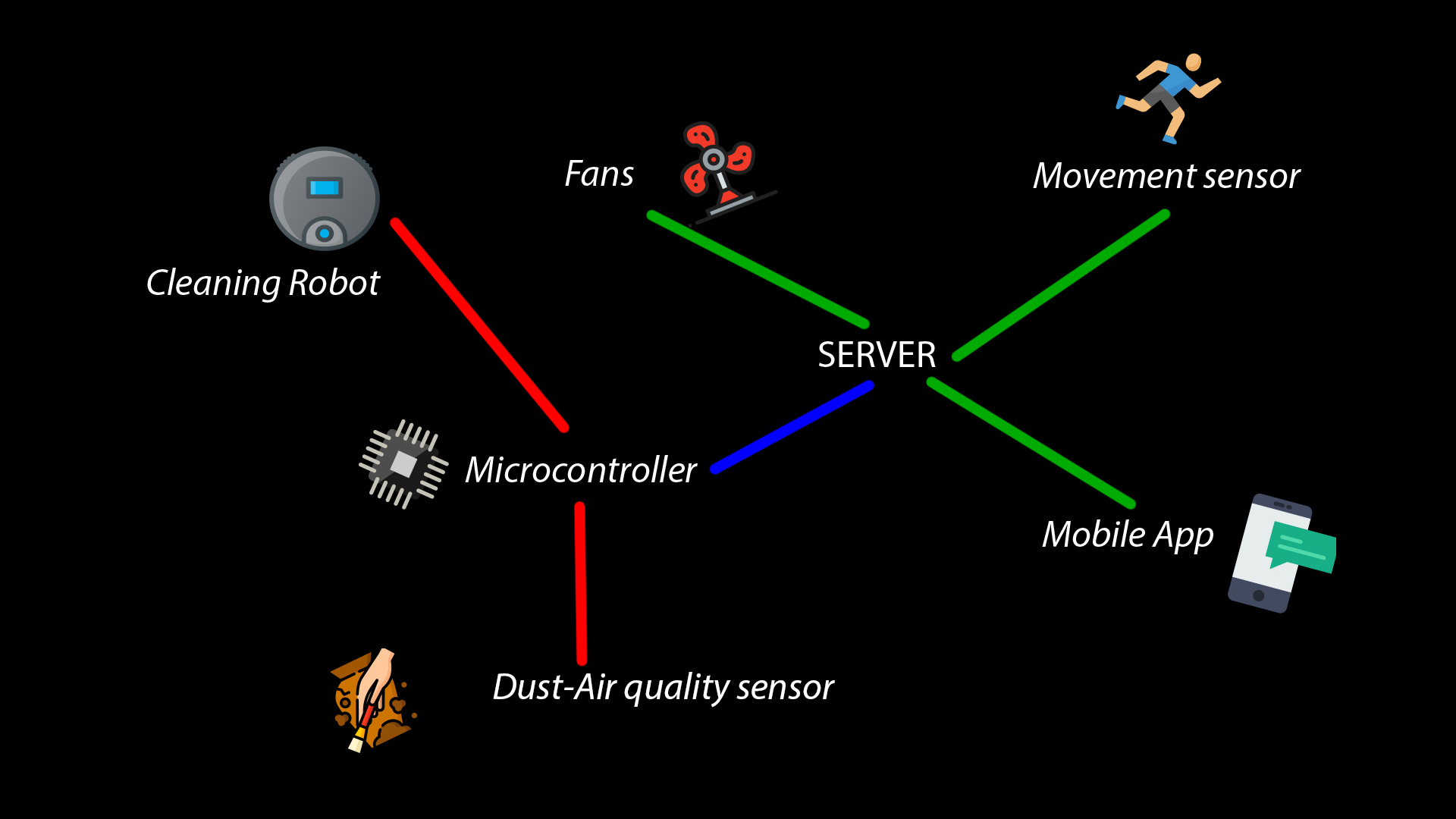
System Architecture
AmIClean's final purpose is to implement an intelligent system able to automatically organize the cleaning of any living places.
By exploiting data about the percentage of dust intensity and air quality in the house coming from different sensors, a cleaning robot will be activated to tidy up the flat. When the living space is completely cleaned the process stops. The system also analyse the presence of people in the house and if someone enters the flat when a cleaning process is going on, the robot rolls back to a default station.
The system not only manage the floor cleaning but, thanks to a system of fans, it purifies the air.
All the data will be collected using motion, dust and air quality sensors spread all over the flat. Furthermore, a smartphone app will let the user communicate to the system the need to start immediately an extra cleaning process (independently from the actual hygienic situation). The user can gives feedback about the last cleaning and even get live-time info about every cleaning process.
| No. | FUNCTIONAL AREA | PRIORITY | FEATURE |
|---|
| 1 | SENSING | 1 | Constant monitoring of the amount of dust and of the air quality in the flat |
| 2 | ACTING | 1 | The system starts the cleaning process if there is a scheduled cleaning, if an unscheduled process is started by the user or if the parameters linked to the amount of dust are overtaken |
| 3 | ACTING | 1 | Intelligent activation of a system of fans to purify the air |
| 4 | INTERACTING | 1 | The user can communicate his level of satisfaction about the cleaning process by rating it through the smartphone app and he can ask the system to start an extra cleaning |
| 5 | REASONING | 2 | Input from user's application about the quality of the last cleaning process would be used to modify the schedule or the hygiene parameters for the future |
| 6 | REASONING | 2 | Auto-set up with default schedule and parameters, if not specified differently by the user |
| 7 | SENSING | 2 | Costant evaluation of the presence of humans in the flat |
| 8 | ACTING | 2 | The robot rolls back if someone during the cleaning process enters the flat. The user can disable this function |
| 9 | INTERACTING | 3 | Diagnostic information constantly sent to the users (by using a smartphone app) about the state of the processes |
| 10 | INTERACTING | 3 | Generation of charts and reviews showing the cleaning trends over a period of time |
| AREA | ELEMENT |
|---|
| Server: the computational centre of the system | |
| Controller: it collects data from the dust sensor and it handles the robot | |
| HARDWARE | Sensors (dust/air quality, motion): they collect data |
| Cleaning robot: it's the centre of the action | |
| Fans: they are activated by the server | |
| Smartphone: to interact with users | |
| Mobile app: it allows the user to start an extra cleaning process, to give feedback and to get diagnostic information | |
| SOFTWARE | Server: it handles the motion sensor and the system of fans, it commands the controller |
| Controller software: it collects data from the dust sensor and it handles the cleaning robot | |
| The server will be connected to the LAN of the house, via Wi-Fi or by cable | |
| NETWORK | The controller is connected to the dust/air quality sensor by wires and it communicates to the server exploiting his Wi-fi connection |
| The robot is connected to the server by Wi-fi. The app uses data from the server |
Roomba robot (LADISPE)
Arduino microcontroller (LADISPE)
Raspberry Pi, as server (LADISPE)
Motion sensor (LADISPE)
Dust/air quality sensor (OTS)
Android Smartphone
RaZberry
Python version 3.6
Android OS (from 5.0)
Arduino IDE 1.8.5
Flask version 0.12
Z-Wave server